As a rover, the HiPer XR GNSS receiver has a full set of communication modules to receive GNSS corrections from an available field source.
| Corrections | Source |
|---|---|
| Satellite Based Augmentation System (SBAS) | Differential corrections from SBAS satellites (WAAS, EGNOS, … that enable the rover to operate with a DGNSS solution) |
| Differential GNSS (DSGNSS) | DGNSS base station that transmits RTCM corrections through:
|
| Real Time Kinematic (RTK) | RTK base station that transmits corrections through:
|
Note: The Topnet Live Skybridge correction service runs on HiPer XR GNSS receivers. It puts together the most accurate and stable RTK and PPP corrections in difficult surveying conditions.
Use a field controller that runs the Topcon field software to configure the receiver as an RTK rover in the field. If necessary, see the software documentation for connection to, configuration of, and control of the receiver.
For an RTK survey operation, you can use the receiver as a base station to transmit GNSS corrections or as a rover to receive GNSS corrections in real time. The corrections can be transmitted or received through UHF, Spread Spectrum, Bluetooth LongLink, or network corrections, such as an integrated cellular modem or internet connection through the field controller.
Standard RTK GPS surveys are kinematic GNSS surveys with a data transfer link between a reference GNSS base station and rover(s). The field survey is equivalent to a kinematic survey, with measurement data from the base station transmitted to the rover unit(s), which enable the rover unit(s) to calculate the position in real time. The derived solution comes from one baseline vector from the base station to the rover unit(s).
A standard RTK system has a GNSS base station, one or more rovers, and a data transfer connection between the base station and the rover unit(s). Usually, the RTK rover unit is has a GNSS receiver, an antenna, a field controller with application software, and a range pole.
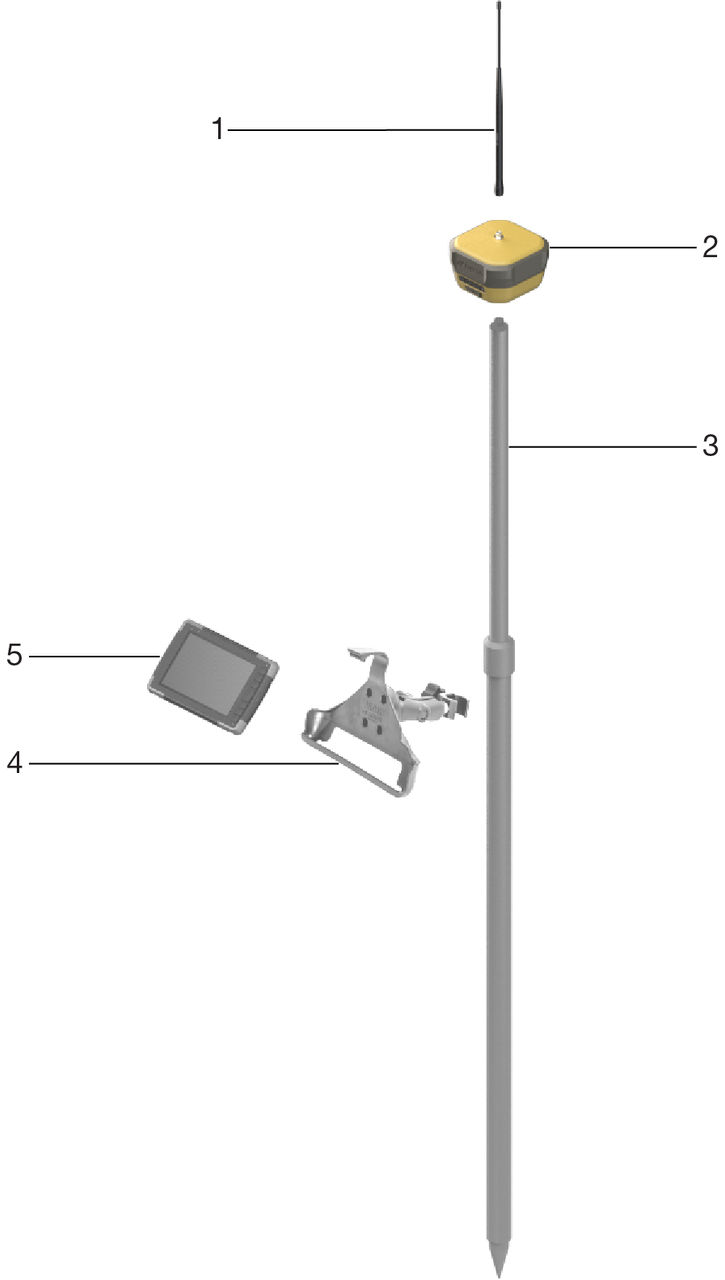
- Radio antenna
- HiPer XR GNSS receiver
- Survey range pole
- Field controller bracket
- Field controller
Previous:
LongLink
myTopcon NOW! support
Take your Topcon experience to the next level with myTopcon NOW! This platform is a self-service tool for your desktop or mobile device.





